IntroductionGiriş
On the 9th of July, 2024, Fatıma Zehra Kınık Demir was entering Fatih Sultan Mehmet (FSM) street from a side road when her vehicle collided with a motorcycle with a passenger. The collision resulted in the death of the passenger along with serious injuries to the motorcyclist and pedestrians. This raised a critical legal question:
9 Temmuz 2024'te Fatıma Zehra Kınık Demir, yan yoldan Fatih Sultan Mehmet (FSM) caddesine girerken aracı yolculu bir motosikletle çarpıştı. Çarpışma, yolcunun ölümüyle ve motosikletçi ile yayaların ciddi şekilde yaralanmasıyla sonuçlandı. Bu, kritik bir hukuki soruyu gündeme getirdi:
Was Zehra negligent for failing to stop in time? Zehra zamanında duramadığı için kusurlu muydu?
This analysis examines the available video evidence, reconstructs the sequence of events, and applies traffic safety research to answer this question. The evidence shows that Zehra stopped at the intersection and waited for traffic to clear, but the motorcycle, hidden behind a yielding minibus, gave her only 1.5 seconds to react once it became visible.
Bu analiz, mevcut video kanıtlarını inceliyor, olayların sırasını yeniden oluşturuyor ve bu soruyu cevaplamak için trafik güvenliği araştırmalarını uyguluyor. Kanıtlar, Zehra'nın kavşakta durduğunu ve trafiğin akmasını beklediğini, ancak yol veren bir minibüsün arkasında gizlenen motosikletin, görünür hale geldiğinde ona tepki vermek için yalnızca 1,5 saniye süre tanıdığını göstermektedir.
Is 1.5 seconds enough time for a reasonable driver to perceive a threat and stop? The answer lies in understanding human Perception-Reaction Time (PRT), the physiological limits of how quickly a driver can respond to an unexpected hazard.
1,5 saniye, makul bir sürücünün bir tehdidi algılayıp durması için yeterli bir süre midir? Cevap, insanın Algılama-Tepki Süresi'ni (ATS) anlamakta yatmaktadır - bir sürücünün beklenmedik bir tehlikeye ne kadar hızlı tepki verebileceğinin fizyolojik sınırları.
Available DataMevcut Veriler
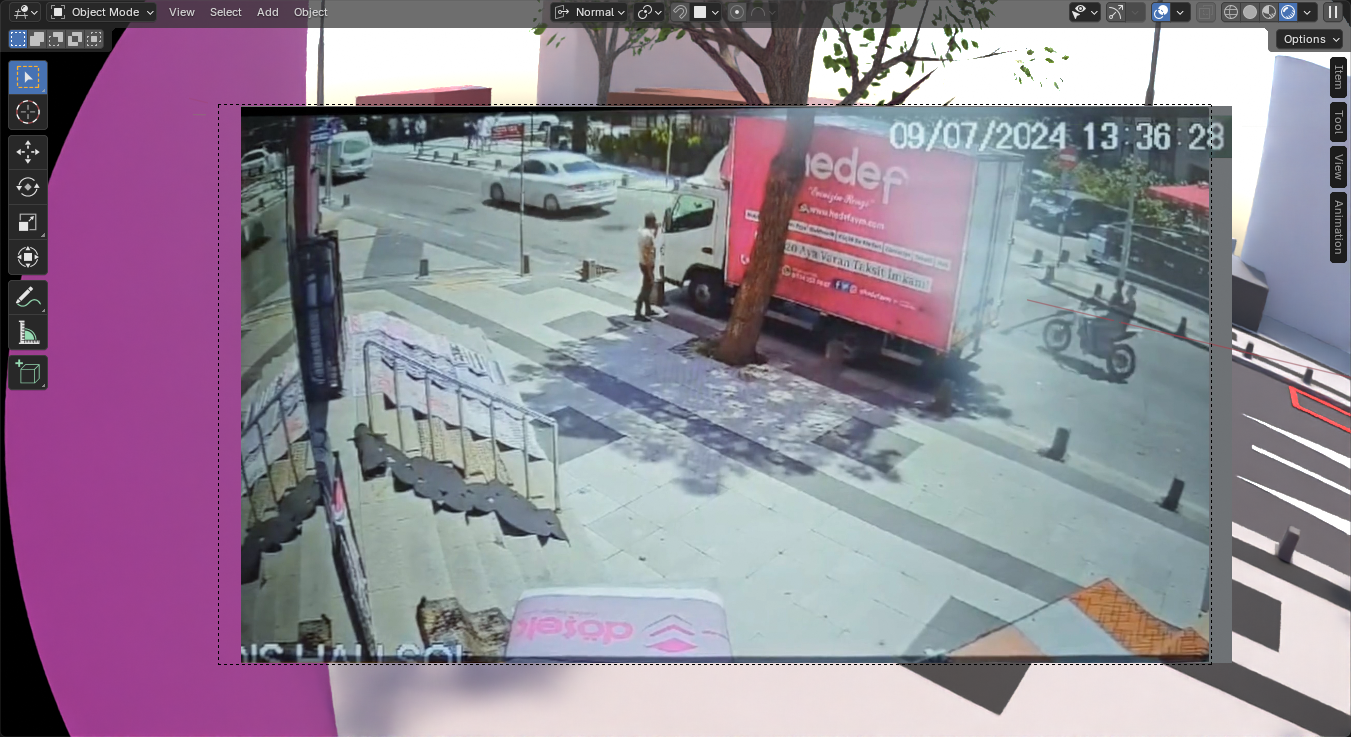
Three CCTV cameras captured the accident from different angles. The original files were never shared with the public. Only screen recordings from mobile devices have surfaced.
Üç güvenlik kamerası kazayı farklı açılardan kaydetti. Orijinal dosyalar hiçbir zaman kamuoyuna paylaşılmadı. Yalnızca mobil cihazlardan alınan ekran kayıtları ortaya çıktı.
The videos below are shown in their original form alongside corrected versions that have been stabilized, synchronized, and color-corrected. These corrected videos form the basis for the reconstruction and timeline analysis.
Aşağıdaki videolar, stabilize edilmiş, senkronize edilmiş ve renk düzeltmesi yapılmış versiyonlarıyla birlikte orijinal halleriyle gösterilmektedir. Bu düzeltilmiş videolar, yeniden yapılandırma ve zaman çizelgesi analizinin temelini oluşturmaktadır.
*Stabilized, cropped, synchronized, and color corrected.
*Stabilize edilmiş, kırpılmış, senkronize edilmiş ve renk düzeltmesi yapılmış.
Satellite imagery showing camera positions relative to the intersection. These perspectives allow us to reconstruct what each driver could and could not see at each moment.
Kavşağa göre kamera konumlarını gösteren uydu görüntüsü. Bu perspektifler, her sürücünün her an neyi görüp neyi göremediğini yeniden oluşturmamıza olanak tanır.

Digital ReconstructionDijital Yeniden Yapılandırma
A 3D reconstruction of the accident was created using satellite imagery. The corrected videos were used to animate vehicle movements, allowing frame-by-frame analysis of positions, speeds, and sight lines.
Uydu görüntüleri kullanılarak kazanın 3 boyutlu bir yeniden yapılandırması oluşturuldu. Düzeltilmiş videolar, araç hareketlerini canlandırmak için kullanıldı ve konumların, hızların ve görüş hatlarının kare kare analizine olanak sağladı.






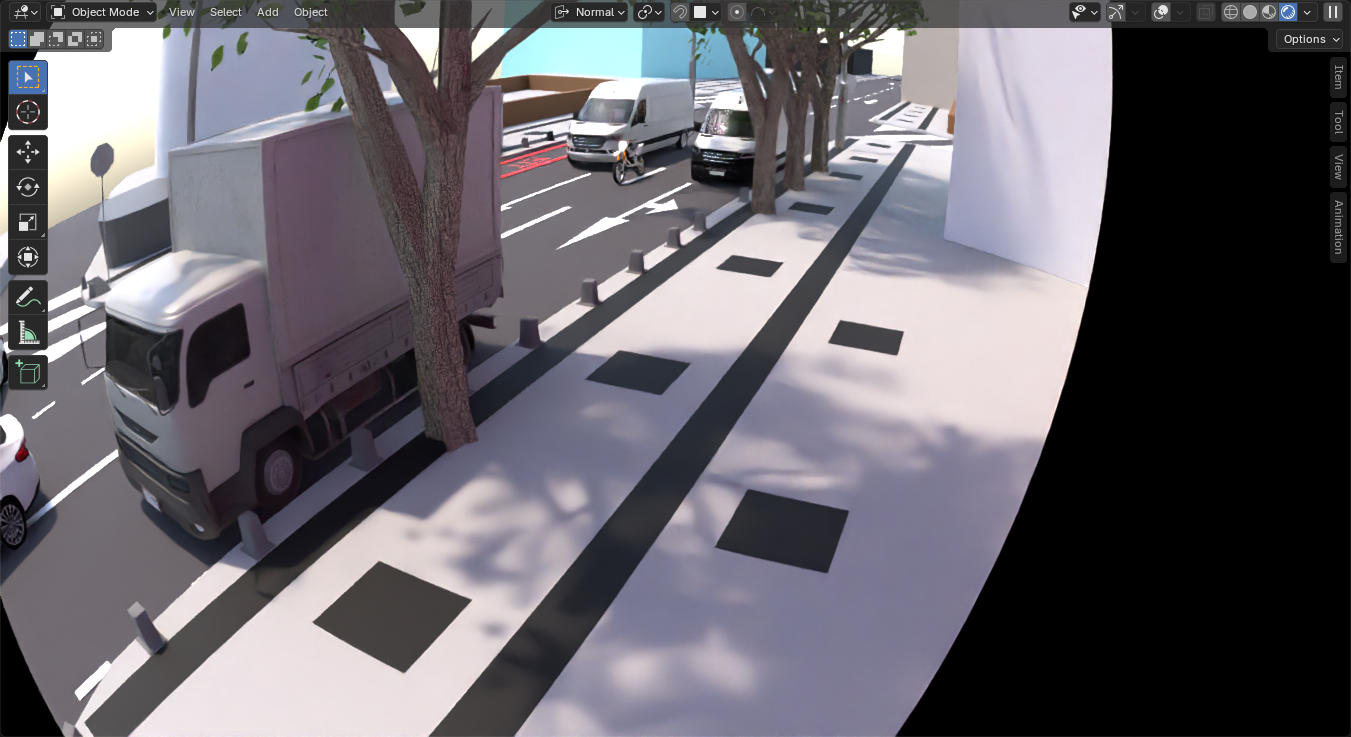
Scale calibration: The scene scale was established using the black sidewalk squares visible in the satellite imagery. Each square measures exactly 100 × 100 mm, providing a precise reference for calibrating distances in the 3D reconstruction.
Ölçek kalibrasyonu: Sahne ölçeği, uydu görüntülerinde görülen siyah kaldırım kareleri kullanılarak belirlendi. Her kare tam olarak 100 × 100 mm ölçülerindedir ve 3 boyutlu yeniden yapılandırmada mesafelerin kalibrasyonu için hassas bir referans sağlamaktadır.
What HappenedNe Oldu
The EnvironmentÇevre
The collision occurred at an intersection where FSM Street crosses Baki Street at a 64-degree angle. FSM Street is a main one-way road with two lanes and a 50 km/h speed limit. This acute angle reduces visibility for vehicles entering FSM Street, making it harder to see oncoming traffic. Crucially, the geometry pushes hazards on FSM Street into the driver’s far-left field of view; to keep an approaching motorcycle and its passenger in sight while creeping into the intersection, Zehra would need to repeatedly (and almost continuously) turn her head left. Any brief glance forward to steer and judge clearance can be enough for a fast-moving vehicle to cover significant distance, and the left A‑pillar plus surrounding vehicles can further mask a road user that is already near the edge of vision.
Çarpışma, iki şeritli ve 50 km/s hız sınırı olan tek yönlü ana yol FSM Caddesi'nin Baki Sokak'ı 64 derecelik bir açıyla kestiği bir kavşakta meydana geldi. Bu dar açı, FSM Caddesi'ne giren araçların görüş alanını azaltarak karşıdan gelen trafiği görmeyi zorlaştırmaktadır. Daha da önemlisi, bu geometri FSM Caddesi üzerindeki tehlikeleri sürücünün sol uç görüş alanına iter; kavşağa yavaşça girerken yaklaşan motosikleti ve yolcusunu görüşte tutmak için Zehra'nın başını sık sık (hatta neredeyse sürekli) sola çevirmesi gerekir. Direksiyonu kontrol etmek ve önünü değerlendirmek için yapılacak kısa bir ileri bakış bile hızlı gelen bir aracın ciddi mesafe kat etmesine yetebilir; ayrıca sol A sütunu ve çevredeki araçlar, zaten görüşün kenarında kalan bir yol kullanıcısını daha da kolay gizleyebilir.


At the time of the accident, the left lane of FSM Street was blocked by illegally parked vehicles, funneling all traffic into the right lane. Despite a clearly visible no stopping and parking sign, multiple vehicles were parked along this section of the road. For a driver waiting to enter from Baki Street, this created the reasonable assumption that the blocked lane was clear. This assumption would prove critical.
Kaza anında, FSM Caddesi'nin sol şeridi yasadışı park halindeki araçlar tarafından kapatılmıştı ve tüm trafik sağ şeride yönlendirilmişti. Açıkça görülebilen durma ve park yasağı işaretine rağmen, yolun bu bölümünde birden fazla araç park halindeydi. Baki Sokak'tan girmek için bekleyen bir sürücü için bu durum, kapalı şeridin boş olduğu makul varsayımını oluşturuyordu - kritik öneme sahip olacak bir varsayım.
These environmental factors (the skewed angle, blocked lane, and on-street parking) would later contribute to the limited time available for hazard detection.
Bu çevresel faktörler (eğik açı, kapalı şerit ve yol üzeri park) daha sonra tehlike algılama için mevcut olan sınırlı süreye katkıda bulunacaktı.
Zehra's ApproachZehra'nın Kavşağa Yaklaşması
The video evidence shows that Zehra approached the intersection and came to a complete stop. She waited as several vehicles passed on FSM Street, watching for a safe gap in traffic.
Video kanıtları, Zehra'nın kavşağa yaklaştığını ve tamamen durduğunu göstermektedir. FSM Caddesi'nden birkaç araç geçerken bekledi ve trafikte güvenli bir boşluk aradı.
A minibus traveling on FSM Street slowed and yielded the right-of-way. With the yielding minibus creating an apparent gap and the blocked left lane appearing clear, Zehra began to enter the intersection.
FSM Caddesi'nde giden bir minibüs yavaşladı ve yol hakkını verdi. Yol veren minibüsün belirgin bir boşluk yaratması ve kapalı sol şeridin boş görünmesiyle birlikte, Zehra kavşağa girmeye başladı.
This behavior (stopping, waiting, proceeding when a vehicle yields) is exactly what a reasonable driver is expected to do. But at this moment, unknown to Zehra, the motorcyclist was approaching from behind the minibus.
Bu davranış (durma, bekleme, bir araç yol verdiğinde ilerleme) makul bir sürücüden beklenen tam olarak budur. Ancak bu anda, Zehra'nın bilmediği şekilde, motorcu minibüsün arkasından yaklaşıyordu.
The Motorcycle's SpeedMotosikletin Hızı
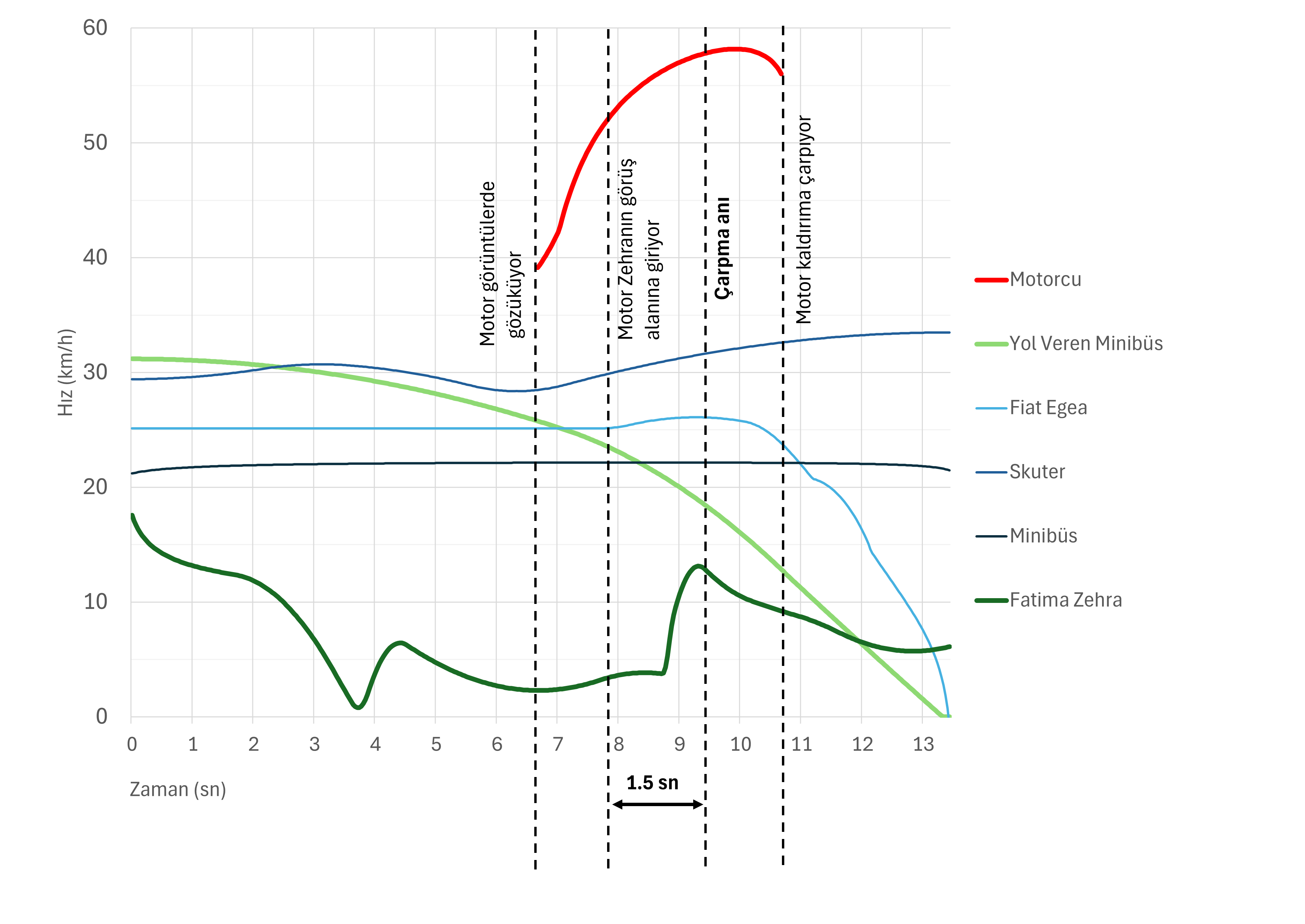
While most vehicles on FSM Street were traveling at approximately 25 km/h, the motorcyclist's motorcycle was moving at 57 km/h. This was more than double the speed of surrounding traffic and exceeded the 50 km/h speed limit.
FSM Caddesi'ndeki çoğu araç yaklaşık 25 km/s hızla giderken, motorcunun motosikleti 57 km/s hızla hareket ediyordu. Bu, çevredeki trafiğin iki katından fazlaydı ve 50 km/s hız sınırını aşıyordu.
As the minibus slowed to yield, the motorcyclist overtook it by lane-splitting on the left of the yielding minibus, passing through the lane that was otherwise blocked by parked vehicles. This maneuver placed his motorcycle directly behind the minibus from Zehra's viewing angle, completely hidden from her line of sight.
Minibüs yol vermek için yavaşladığında, motorcu yol veren minibüsü soldan şerit bölme yaparak geçti ve park halindeki araçlar nedeniyle normalde kapalı olan şeritten ilerledi. Bu manevra, motosikletini Zehra'nın bakış açısından doğrudan minibüsün arkasına yerleştirdi ve görüş alanından tamamen gizledi.
At 57 km/h, the motorcycle was above the 50 km/h urban limit (whether posted by sign or applicable as the general urban limit when no sign is present). Separately, the absence of a specific sign for a given road feature does not mean a driver may maintain any speed: Turkish traffic law (Articles 52/1-a and 52/1-b of the Karayolları Trafik Kanunu) requires drivers to reduce speed according to road conditions. In practical terms, the presence of traffic-calming infrastructure such as speed bumps triggers a duty to slow down even if the general limit is 50 km/h, because these features are typically engineered for much lower safe crossing speeds (often on the order of 20-30 km/h).
57 km/s hızla motosiklet, 50 km/s şehir içi sınırın üzerindedir (ister tabelayla belirlenmiş olsun ister tabelanın olmadığı durumda uygulanan genel şehir içi sınır olarak kabul edilsin). Ayrıca, belirli bir yol unsuruna ilişkin özel bir tabelanın bulunmaması, sürücünün istediği hızla seyredebilmesi anlamına gelmez: Karayolları Trafik Kanunu'nun 52/1-a ve 52/1-b maddeleri, sürücülere hızlarını yolun durumuna göre azaltma yükümlülüğü getirir. Uygulamada, kasis gibi trafik sakinleştirme unsurlarının varlığı, genel sınır 50 km/s olsa bile hızın düşürülmesini gerektirir; çünkü bu tür unsurlar genellikle daha düşük güvenli geçiş hızlarına (çoğu durumda 20-30 km/s mertebesi) göre tasarlanır.


The Critical 1.5 SecondsKritik 1,5 Saniye
Video analysis establishes the crucial timeline: when the motorcycle finally cleared the minibus obstruction and entered Zehra's potential field of view, it was approximately 23 meters away, traveling at a speed that closed this distance in 1.5 seconds.
Video analizi kritik zaman çizelgesini ortaya koymaktadır: motosiklet sonunda minibüs engelini aşıp Zehra'nın potansiyel görüş alanına girdiğinde, yaklaşık 23 metre uzaktaydı ve bu mesafeyi 1,5 saniyede kapatan bir hızla hareket ediyordu.
That “sudden emergence” occurred because the motorcyclist had overtaken the yielding minibus by lane-splitting on the left—moving into the lane constrained by parked vehicles—so from Zehra's angle the motorcycle remained fully hidden behind the minibus until the final moment.
Bu “ani ortaya çıkış”, motorcunun yol veren minibüsü soldan şerit bölme yaparak geçip park halindeki araçlarla daralmış şeride girmesi nedeniyle gerçekleşti; bu yüzden Zehra'nın bakış açısından motosiklet, son ana kadar minibüsün arkasında tamamen gizli kaldı.
To put this in perspective: 1.5 seconds is around 2 heart beats.
Bunu perspektife koymak gerekirse: 1,5 saniye yaklaşık 2 kalp atışı kadardır.
In that brief window, Zehra would need to:
Bu kısa sürede, Zehra'nın şunları yapması gerekirdi:
- Notice the motorcycle among all other visual stimuli
- Diğer tüm görsel uyaranlar arasında motosikleti fark etmek
- Recognize it as a threat (not all movement requires a response)
- Onu bir tehdit olarak tanımak (her hareket bir tepki gerektirmez)
- Decide to brake
- Fren yapmaya karar vermek
- Move her foot from the accelerator to the brake pedal
- Ayağını gaz pedalından fren pedalına taşımak
- Apply sufficient braking force
- Yeterli frenleme kuvveti uygulamak
...all while simultaneously monitoring for crossing pedestrians and managing her vehicle through the intersection.
...tüm bunları, aynı anda karşıdan karşıya geçen yayaları izleyip aracını kavşakta yönetirken yapması gerekirdi.
Was 1.5 seconds enough time? To answer this question, we must examine what traffic safety research tells us about human reaction capabilities.
1,5 saniye yeterli bir süre miydi? Bu soruyu cevaplamak için, trafik güvenliği araştırmalarının insan tepki yetenekleri hakkında bize ne söylediğini incelememiz gerekir.
This visual occlusion is not a matter of inattention on Zehra's part. It is a geometric impossibility. She could not see what was physically blocked from her line of sight.
Bu görsel engelleme, Zehra'nın dikkatsizliği meselesi değildir. Geometrik bir imkansızlıktır. Görüş alanından fiziksel olarak engellenmiş olanı göremezdi.
Could Zehra Have Stopped?Zehra Durabilir miydi?
What is Perception-Reaction Time?Algılama-Tepki Süresi Nedir?
Perception-Reaction Time (PRT) is the interval between when a driver first sees a hazard and when they begin taking action to avoid it. It's a fundamental concept in traffic safety engineering and represents a basic limitation of human physiology. No matter how alert or skilled a driver is, the brain and body require time to process information and respond.
Algılama-Tepki Süresi (ATS), bir sürücünün bir tehlikeyi ilk gördüğü an ile ondan kaçınmak için harekete geçmeye başladığı an arasındaki süredir. Trafik güvenliği mühendisliğinde temel bir kavramdır ve insan fizyolojisinin temel bir sınırlamasını temsil eder. Sürücü ne kadar dikkatli veya yetenekli olursa olsun, beyin ve vücut bilgiyi işlemek ve tepki vermek için zamana ihtiyaç duyar.
PRT consists of four sequential stages:
ATS dört ardışık aşamadan oluşur:
- Detection: The hazard appears in the driver's field of view and is noticed among all other visual stimuli
- Algılama: Tehlike, sürücünün görüş alanında belirir ve diğer tüm görsel uyaranlar arasında fark edilir
- Recognition: The driver identifies the object as a potential threat
- Tanıma: Sürücü nesneyi potansiyel bir tehdit olarak tanımlar
- Decision: The driver determines the appropriate response (brake, swerve, etc.)
- Karar: Sürücü uygun tepkiyi belirler (fren, manevra vb.)
- Response initiation: The driver physically moves their foot to the brake and begins applying pressure
- Tepki başlatma: Sürücü fiziksel olarak ayağını frene taşır ve baskı uygulamaya başlar
Critically, PRT measures only the time until the brake is applied. It does not include the additional time required for the vehicle to actually decelerate and stop. Total stopping distance = PRT + braking distance.
Kritik olarak, ATS yalnızca frenin uygulandığı ana kadar olan süreyi ölçer. Aracın gerçekten yavaşlaması ve durması için gereken ek süreyi içermez. Toplam durma mesafesi = ATS + frenleme mesafesi.
For unexpected hazards (situations where the driver has no advance warning), research shows that the 95th percentile PRT is approximately 1.6 seconds under ideal laboratory conditions (Olson & Sivak, 1986). This means 95% of drivers require at least 1.6 seconds to respond.
Beklenmedik tehlikeler için (sürücünün önceden uyarı almadığı durumlar), araştırmalar ideal laboratuvar koşullarında 95. yüzdelik ATS'nin yaklaşık 1,6 saniye olduğunu göstermektedir (Olson & Sivak, 1986). Bu, sürücülerin %95'inin tepki vermek için en az 1,6 saniyeye ihtiyaç duyduğu.
Zehra's Conditions Were Far From Ideal ConditionsZehra'nın Koşulları İdeal Koşullardan Çok Uzaktaydı
The 1.6-second PRT benchmark represents a best-case scenario: drivers in a controlled environment, expecting a possible hazard, with the obstacle appearing directly in their travel path with no visual obstructions. Zehra's circumstances were dramatically worse:
1,6 saniyelik ATS kıyaslaması bir en iyi durum senaryosunu temsil eder: kontrollü bir ortamda, olası bir tehlike bekleyen, engelin görsel engeller olmadan doğrudan seyir yolunda belirdiği sürücüler. Zehra'nın koşulları dramatik şekilde daha kötüydü:
- Visual occlusion: The motorcycle was completely hidden behind the minibus until it suddenly emerged, providing no advance warning
- Görsel engelleme: Motosiklet, aniden ortaya çıkana kadar minibüsün arkasında tamamen gizliydi ve önceden hiçbir uyarı sağlamadı
- Unexpected location: The threat appeared from behind a yielding vehicle, a location that typically signals safety, not danger
- Beklenmedik konum: Tehdit, yol veren bir aracın arkasından belirdi; genellikle tehlike değil güvenlik sinyali veren bir konum
- Divided attention: Zehra was navigating a complex intersection, monitoring the yielding minibus, checking for pedestrians, and managing her vehicle's movement
- Bölünmüş dikkat: Zehra karmaşık bir kavşakta navigasyon yapıyor, yol veren minibüsü izliyor, yayaları kontrol ediyor ve aracının hareketini yönetiyordu
- Environmental complexity: Multiple moving vehicles, a skewed 64-degree intersection angle, and on-street parking all increased cognitive workload
- Çevresel karmaşıklık: Birden fazla hareketli araç, eğik 64 derecelik kavşak açısı ve yol üzeri park, bilişsel iş yükünü artırdı
- Violated expectations: The motorcycle's lane-splitting maneuver contradicted normal traffic behavior, requiring additional cognitive processing to recognize as a threat
- İhlal edilen beklentiler: Motosikletin şerit bölme manevrası normal trafik davranışıyla çelişiyordu ve tehdit olarak tanınmak için ek bilişsel işleme gerektiriyordu
Research on real-world driving environments demonstrates that these complicating factors significantly extend PRT. Studies of drivers in complex urban environments with on-street parking, multiple vehicles, and divided attention show reaction times extending to 2.0 seconds or more (Edquist et al., 2012). Critically, these studies found that drivers did not reduce speed sufficiently to maintain safe hazard response times even when experiencing higher mental workload. This suggests that cognitive demands inherently impair reaction capabilities.
Gerçek dünya sürüş ortamlarına ilişkin araştırmalar, bu karmaşıklaştırıcı faktörlerin ATS'yi önemli ölçüde uzattığını göstermektedir. Yol üzeri park, birden fazla araç ve bölünmüş dikkat içeren karmaşık kentsel ortamlardaki sürücülere ilişkin çalışmalar, tepki sürelerinin 2,0 saniye veya daha fazlaya uzadığını göstermektedir (Edquist ve ark., 2012). Kritik olarak, bu çalışmalar, sürücülerin daha yüksek zihinsel iş yükü yaşarken bile güvenli tehlike tepki sürelerini korumak için hızlarını yeterince düşürmediklerini buldu. Bu da bilişsel taleplerin doğası gereği tepki yeteneklerini bozduğunu düşündürmektedir.
Naturalistic crash analysis of intersection path intrusions (where vehicles unexpectedly enter a driver's path from perpendicular angles) confirms that response times are highly variable and critically dependent on when the intruding vehicle becomes visible and whether the driver's attention is already allocated to that spatial zone (Dinakar et al., 2020).
Kavşak yolu ihlallerinin doğal kaza analizi (araçların beklenmedik şekilde dik açılardan bir sürücünün yoluna girdiği durumlar) tepki sürelerinin oldukça değişken olduğunu ve kritik olarak ihlal eden aracın ne zaman görünür hale geldiğine ve sürücünün dikkatinin zaten o uzamsal bölgeye tahsis edilip edilmediğine bağlı olduğunu doğrulamaktadır (Dinakar ve ark., 2020).
Moreover, effective hazard perception requires drivers to anticipate dangers based on environmental cues. When a vehicle appears from an unexpected location while performing an illegal maneuver, cognitive processing time increases because the driver must first overcome their reasonable expectation of safety (Habibzadeh et al., 2023).
Ayrıca, etkili tehlike algısı, sürücülerin çevresel ipuçlarına dayanarak tehlikeleri önceden tahmin etmesini gerektirir. Bir araç yasadışı bir manevra yaparken beklenmedik bir konumdan belirdiğinde, bilişsel işleme süresi artar çünkü sürücünün önce makul güvenlik beklentisini aşması gerekir (Habibzadeh ve ark., 2023).
From the moment the motorcycle cleared the minibus and first became visible to the moment of impact, the available window was just 1.5 seconds. That is shorter than the 95th percentile Perception-Reaction Time (PRT) of roughly 1.6 seconds measured under ideal laboratory conditions, and far shorter than the 2.0+ seconds commonly observed when visibility is occluded, attention is divided, and when hazards appear from unexpected locations. Even if Zehra had reacted instantaneously, the additional braking distance required to bring her vehicle to a complete stop would have made collision avoidance impossible within this timeframe.
Motosikletin minibüsü geçip ilk kez görünür hale geldiği andan çarpışma anına kadar mevcut pencere sadece 1,5 saniyeydi. Bu, ideal laboratuvar koşullarında ölçülen yaklaşık 1,6 saniyelik 95. yüzdelik Algılama-Tepki Süresinden (ATS) daha kısa ve görünürlüğün engellendiği, dikkatin bölündüğü ve tehlikelerin beklenmedik konumlardan belirdiği durumlarda yaygın olarak gözlemlenen 2,0+ saniyeden çok daha kısadır. Zehra anında tepki vermiş olsa bile, aracını tamamen durdurmak için gereken ek frenleme mesafesi, bu zaman diliminde çarpışmadan kaçınmayı imkansız kılardı.
ConclusionSonuç
The evidence shows that Zehra:
Kanıtlar Zehra'nın:
- Stopped at the intersection as required
- Gerektiği gibi kavşakta durduğunu
- Waited for cross-traffic to clear
- Karşı trafiğin geçmesini beklediğini
- Proceeded when a vehicle yielded right-of-way
- Bir araç yol verdiğinde ilerlediğini
- Had no visual of the motorcycle until it emerged from behind the minibus
- Motosiklet minibüsün arkasından çıkana kadar görsel erişim olmadığını
- Had insufficient time to perceive and respond to the motorcycle
- Motosikleti algılamak ve tepki vermek için yetersiz süreye sahip olduğunu göstermektedir
The motorcycle's lane-splitting maneuver violated Zehra's reasonable expectations of traffic behavior. Passing on the left side of a yielding vehicle is both unexpected and, in many jurisdictions, prohibited precisely because it creates situations where other drivers cannot reasonably anticipate the approaching vehicle. Drivers cannot be expected to maintain constant vigilance for violations of traffic norms that occur outside their field of view.
Motosikletin şerit bölme manevrası, Zehra'nın makul trafik davranışı beklentilerini ihlal etti. Yol veren bir aracın sol tarafından geçmek hem beklenmediktir hem de birçok yargı alanında, diğer sürücülerin yaklaşan aracı makul şekilde öngöremeyeceği durumlar yarattığı için yasaklanmıştır. Sürücülerden, görüş alanları dışında meydana gelen trafik normları ihlalleri için sürekli tetikte olmaları beklenemez.
The PRT analysis demonstrates that Zehra's inability to stop does not constitute negligence. The collision resulted from the motorcycle's unexpected lane-splitting maneuver creating a hazard that appeared outside Zehra's field of view with insufficient time for a reasonable driver to detect and respond.
ATS analizi, Zehra'nın duramamasının kusur teşkil etmediğini göstermektedir. Çarpışma, motosikletin beklenmedik şerit bölme manevrasının Zehra'nın görüş alanı dışında, makul bir sürücünün algılayıp tepki vermesi için yetersiz süreyle beliren bir tehlike yaratmasından kaynaklanmıştır.
The temporal constraints (1.5 seconds from emergence to impact) fall below the documented reaction times for drivers facing unexpected hazards in complex environments (2.0+ seconds), and even approach the laboratory baseline (1.6 seconds) measured under ideal conditions.
Zamansal kısıtlamalar (ortaya çıkmadan çarpışmaya 1,5 saniye) karmaşık ortamlarda beklenmedik tehlikelerle karşılaşan sürücüler için belgelenen tepki sürelerinin (2,0+ saniye) altına düşmekte ve hatta ideal koşullar altında ölçülen laboratuvar temeline (1,6 saniye) yaklaşmaktadır.
Negligence cannot be predicated on a failure to achieve what research suggests is highly improbable given the environmental conditions and human physiological limitations. The reasonable driver standard must account for documented limitations in perception, cognition, and motor response when confronted with occluded hazards in complex traffic environments.
Kusur, çevresel koşullar ve insan fizyolojik sınırlamaları göz önüne alındığında araştırmaların oldukça olası olmadığını öne sürdüğü şeyi başaramamaya dayandırılamaz. Makul sürücü standardı, karmaşık trafik ortamlarında engellenmiş tehlikelerle karşı karşıya kalındığında algılama, biliş ve motor tepkisindeki belgelenmiş sınırlamaları hesaba katmalıdır.
Under these constraints, Zehra's actions appear to be consistent with those of a reasonable, attentive driver operating under conditions that made effective hazard avoidance highly improbable.
Bu kısıtlamalar altında, Zehra'nın eylemleri, etkili tehlikeden kaçınmanın son derece olası olmadığı koşullarda hareket eden makul ve dikkatli bir sürücünün davranışlarıyla tutarlı görünmektedir.
ReferencesKaynaklar
Olson, P. L., & Sivak, M. (1986). Perception-Response Time to Unexpected Roadway Hazards. Human Factors, 28(1), 91-96. https://doi.org/10.1177/001872088602800110
Relevant information: 95th percentile PRT for unalerted drivers encountering unexpected obstacles is approximately 1.6 seconds from first sighting until brake application begins.
Edquist, J., Rudin-Brown, C. M., & Lenné, M. G. (2012). The effects of on-street parking and road environment visual complexity on travel speed and reaction time. Accident Analysis & Prevention, 45, 759-765. https://doi.org/10.1016/j.aap.2011.10.001
Relevant information: Drivers in complex environments with on-street parking experience elevated mental workload and reaction times extending beyond 2.0 seconds.
Dinakar, S., Muttart, J., Suway, J., Marr, J., Edewaard, D., & Enes, A. (2020). Driver Response Times to Side Road Path Intrusions from SHRP-2 Naturalistic Database. Proceedings of the Human Factors and Ergonomics Society Annual Meeting, 64(1), 1525-1529. https://doi.org/10.1177/1071181320641365
Relevant information: Response times to perpendicular path intrusions depend critically on when the intruding vehicle becomes visible and whether it violates expected traffic behavior.
Habibzadeh, Y., Yarmohammadian, M. H., & Sadeghi-Bazargani, H. (2023). Driving Hazard Perception Components: A Systematic Review and Meta-Analysis. Bulletin of Emergency & Trauma, 11(1), 1-12. https://doi.org/10.30476/beat.2023.95410.1356
Relevant information: Effective hazard perception requires anticipating dangers based on environmental cues; drivers cannot maintain constant vigilance for norm violations outside their field of view.